Structure And Composition Of Single Bucket Hydraulic Excavator
According to the overall structure of the excavator, the single bucket hydraulic excavator is divided into three parts: a working device, an upper turntable and a traveling device. However, for suspended or semi-slewing single bucket hydraulic excavators, there is generally no upper turntable.

According to the function of the components, the single bucket excavator is mainly composed of power unit, working device, slewing device, walking device, hydraulic system and electrical control system.
Basic structure composition of ordinary backhoe hydraulic excavator
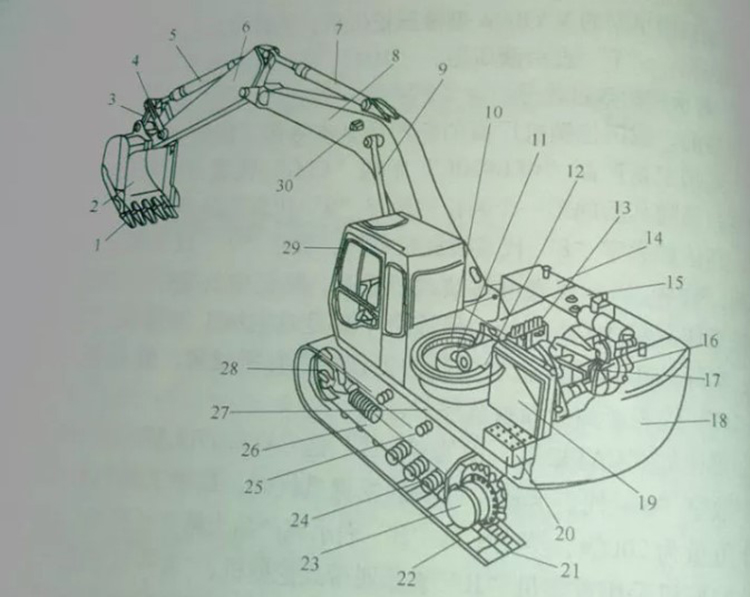
1—bucket teeth 11—central rotary joint 21—chain link
2—bucket 12—slewing mechanism assembly 22—track shoes
3—link 13—main control valve 23—travel drive assembly
4 a rocker arm 14 a fuel tank 24-roller
5—bucket cylinder 15—hydraulic oil tank 25—sprocket wheel
6—Boom stick 16—Hydraulic chestnut assembly 26—Crawler frame
7- stick cylinder 17- engine assembly 27- upper turntable
8- boom 18- counterweight 28- guide wheel
9 a boom cylinder 19 a radiator and oil cooler 29-cab
10—slewing bearing 20—battery 30—working light
Most of the hydraulic excavator's power source is a diesel engine. In places where power supply is convenient, electric motors can also be used instead.
The working device is a device that directly completes the excavation task. It generally consists of three parts: a boom, an arm, and a bucket. The boom movement, arm swing and bucket rotation are all driven by reciprocating double-acting hydraulic cylinders. In order to meet the requirements of various construction operations, hydraulic excavators can be equipped with a variety of working devices, such as digging devices, lifting devices, loading devices, leveling devices, clamp devices, bulldozing devices, impact hammers, etc.
The upper slewing platform (referred to as the upper turret) and the traveling device are carriers for the remaining parts of the hydraulic excavator. The slewing platform is placed on the walking device through the slewing support, and the upper part of the slewing platform is equipped with other auxiliary devices such as a power unit and a transmission system cab.
The hydraulic system consists of a hydraulic pump, a control valve, a hydraulic cylinder, a hydraulic motor, a pipeline, and a fuel tank. The hydraulic transmission system transmits the power of the engine to hydraulic motors, hydraulic cylinders and other actuators through hydraulic pumps, pushing the working devices to complete various tasks.
The electrical control system includes a monitoring panel, an engine control system, a pump control system, various sensors, and solenoid valves.
The basic structural form of a crawler ordinary backhoe full-slewing, full-hydraulic single-bucket hydraulic excavator. The so-called full-hydraulic refers to the action and rotation of its working devices (including booms, sticks, buckets and their corresponding components). Movement and walking (straight and steering) are hydraulically driven. As far as its overall structure is concerned, the rest of the components except the chassis and the walking mechanism are arranged on the upper turntable. The working device part is hingedly connected to the upper slewing platform. The figure is a longitudinal plan view. The entire working device can be swung up and down around 6 points under the driving of a boom cylinder to raise or lower the working device to the required position.
The upper turntable and the lower running mechanism are connected by a slewing bearing. The slewing bearing is divided into upper and lower parts, and its driving is completed by a slewing motor and a reduction mechanism. The slewing motor, the slewing reduction mechanism and the slewing bearing outer race are bolted to the upper slewing platform.
The inner ring of the slewing bearing and the ring gear are fixed on the base frame. When the output pinion of the slewing reduction mechanism rotates around its own axis, it will also make planetary rotation around the slewing center, which will drive the upper turntable to rotate. This will be described further below.
The crawler-type running part is a normal four-wheeled one belt, and its direct driving and steering are independently driven by the traveling motor assemblies on both sides.
For the single-bucket hydraulic excavator, in addition to its walking mechanism different from the crawler type, it is generally equipped with outriggers, which are lowered during operation to increase the contact area of the whole machine with the ground and improve the stability during operation. In addition, in order to improve transmission efficiency and speed, some tire-type walking mechanisms adopt mechanical transmission. Power is transmitted to the lower part of the rotary platform through the central vertical transmission shaft, and then to the drive axle and wheels through the subsequent horizontal transmission shaft. In addition to the above-mentioned mechanical walking transmission mechanism, the tire-type hydraulic excavator also has liquid type and mechanical hydraulic type walking transmission mechanism, and its structure and principle will be described in detail later.
Judging from the rotation range of the upper slewing platform, most excavators adopt a full-slewing method that can rotate 360 °, but semi-slewing types are mostly used on small excavators and backhoe loaders, and most of them can only be implemented by the working device. As shown in the figure, the backhoe loader uses a semi-slewing method for its digging work device. The slewing drive device includes a cylinder driving method, a cylinder plus rack and pinion method, and an oil motor driving method. But no matter which way, the working device part can only achieve a rotation of about 180 °, that is, a left and right rotation of about 90 °.

The engine, hydraulic pump, various control valves and related components are fixed on the rotary platform. As shown in the figure, the rear of the platform is generally equipped with a counterweight to balance the weight of the front-end working device to ensure the stability of the whole machine. The cab is placed on the lower side of the boom at the front of the platform to ensure that the driver can fully observe the movement of the working device during operation, improve operation efficiency, avoid blind operation and safety accidents.